Preliminary Sketches
| 
| 
| 
|
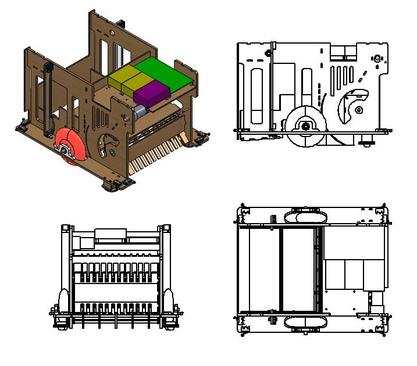
Preliminary CAD design

For our preliminary design, we decided to implement a scooping mechanism to scoop the ball up from the floor through a spring-loaded door into a large collector box. The planned collector box is made as large as possible so as to minimize the number of times that we need to drive to the deposit area and deposit the ping-pong balls. Since the wall is 3.5'' above the ground, a linear guide is used to elevate the entire collector box upwards over the wall. The rear part of the box will then open up under gravity and the ping pong balls will roll down into the deposit area.
Final CAD design
|
| ||||||||||
Final Design
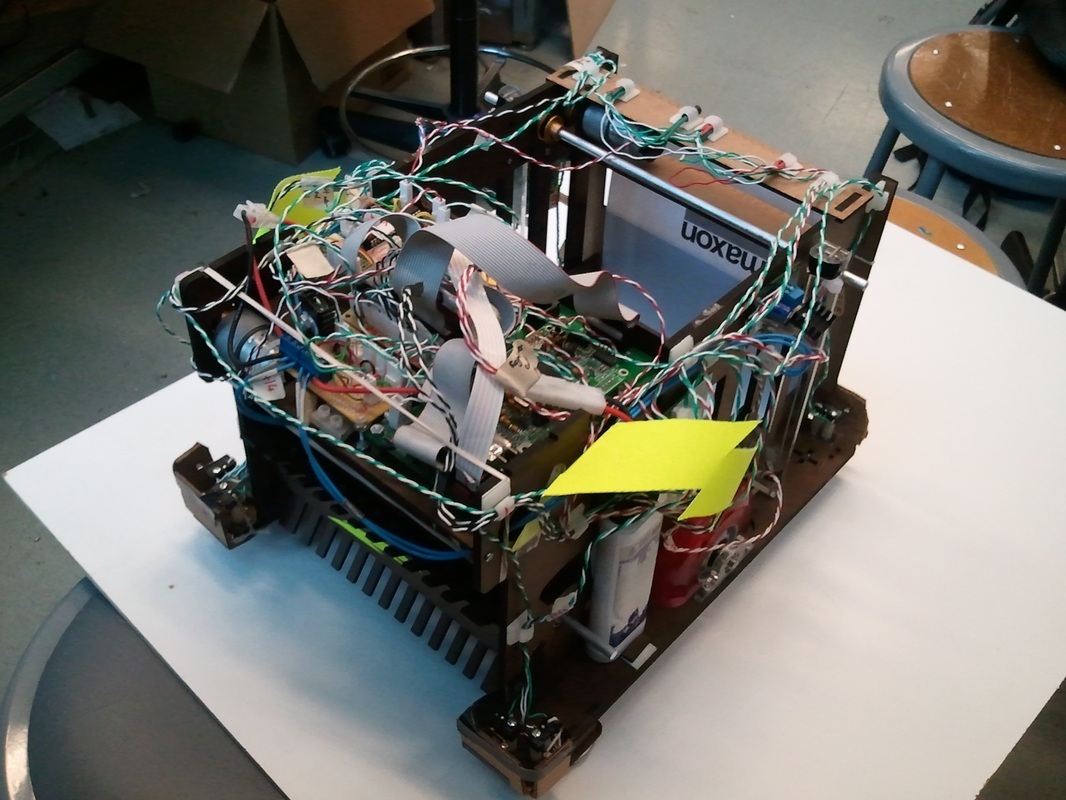
In our first prototype, we realized several problems and quickly made modifications to address them. The spring-loaded door was generating too much impulsive forces to the scooping mechanism which resulted in the mechanism being stuck occasionally. This was resolved using elastic strings which acted as both a passive door and a guide to for the balls.
Secondly, the linear guide was not as robust as we thought it would be. Transverse forces along the linear guide were generating huge amounts of friction. Moreover, when torsion is present, the collector box gets stuck easily. To address the issue, a capstan transmission was used. With the new transmission, friction was quickly removed since the cables will only wrap and unwrap around the driving shaft.
Finally, although the door at the rear of the collector box worked well, we simplified the design by using a piece of paper instead. With the collector box raised, the paper will unroll itself to guide the balls into the bins. Additionally, the paper improved robustness by complying to the bins' surface thus overcoming alignment errors when the mobile base approaches the bin to deposit.
Secondly, the linear guide was not as robust as we thought it would be. Transverse forces along the linear guide were generating huge amounts of friction. Moreover, when torsion is present, the collector box gets stuck easily. To address the issue, a capstan transmission was used. With the new transmission, friction was quickly removed since the cables will only wrap and unwrap around the driving shaft.
Finally, although the door at the rear of the collector box worked well, we simplified the design by using a piece of paper instead. With the collector box raised, the paper will unroll itself to guide the balls into the bins. Additionally, the paper improved robustness by complying to the bins' surface thus overcoming alignment errors when the mobile base approaches the bin to deposit.
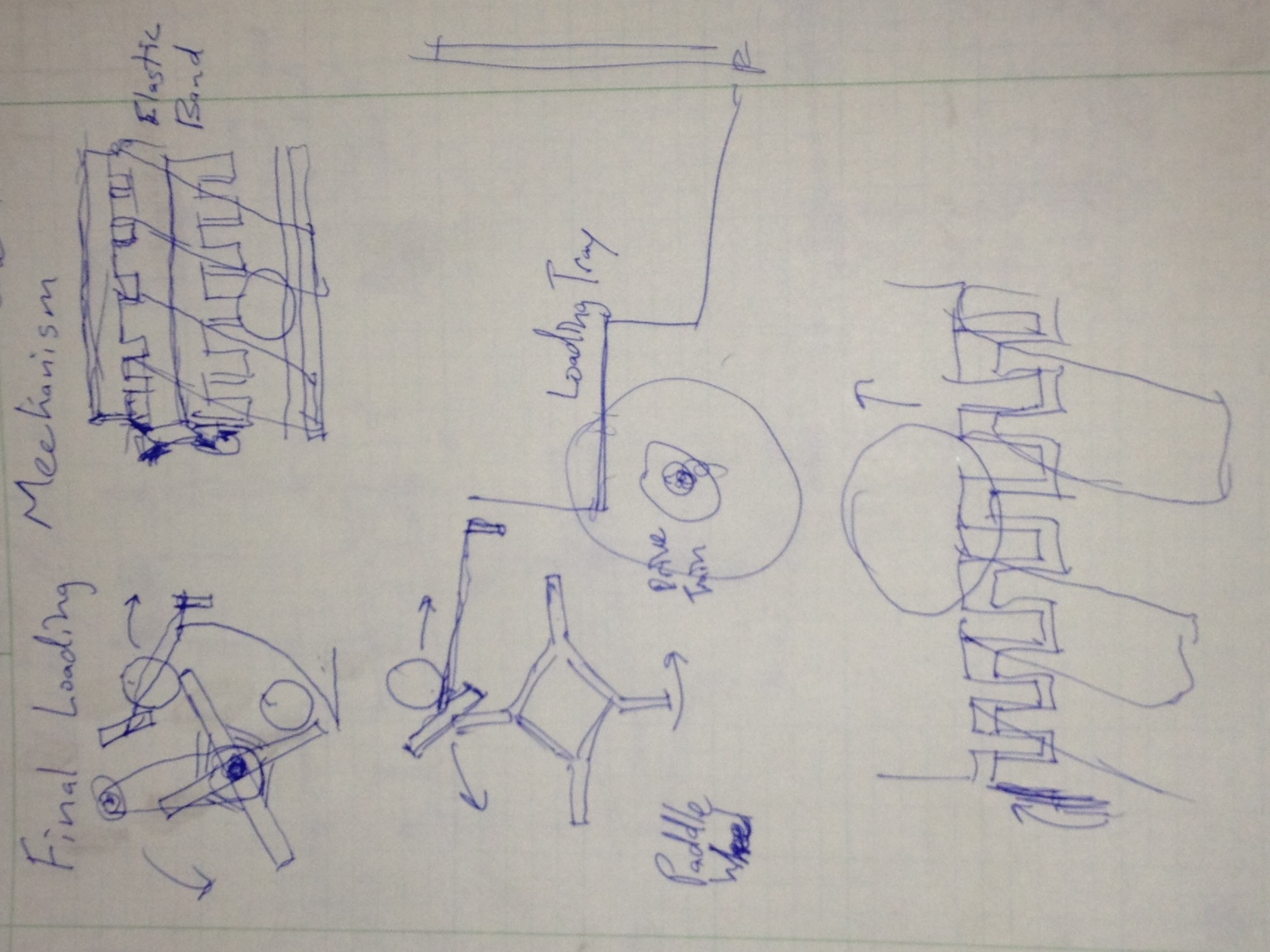
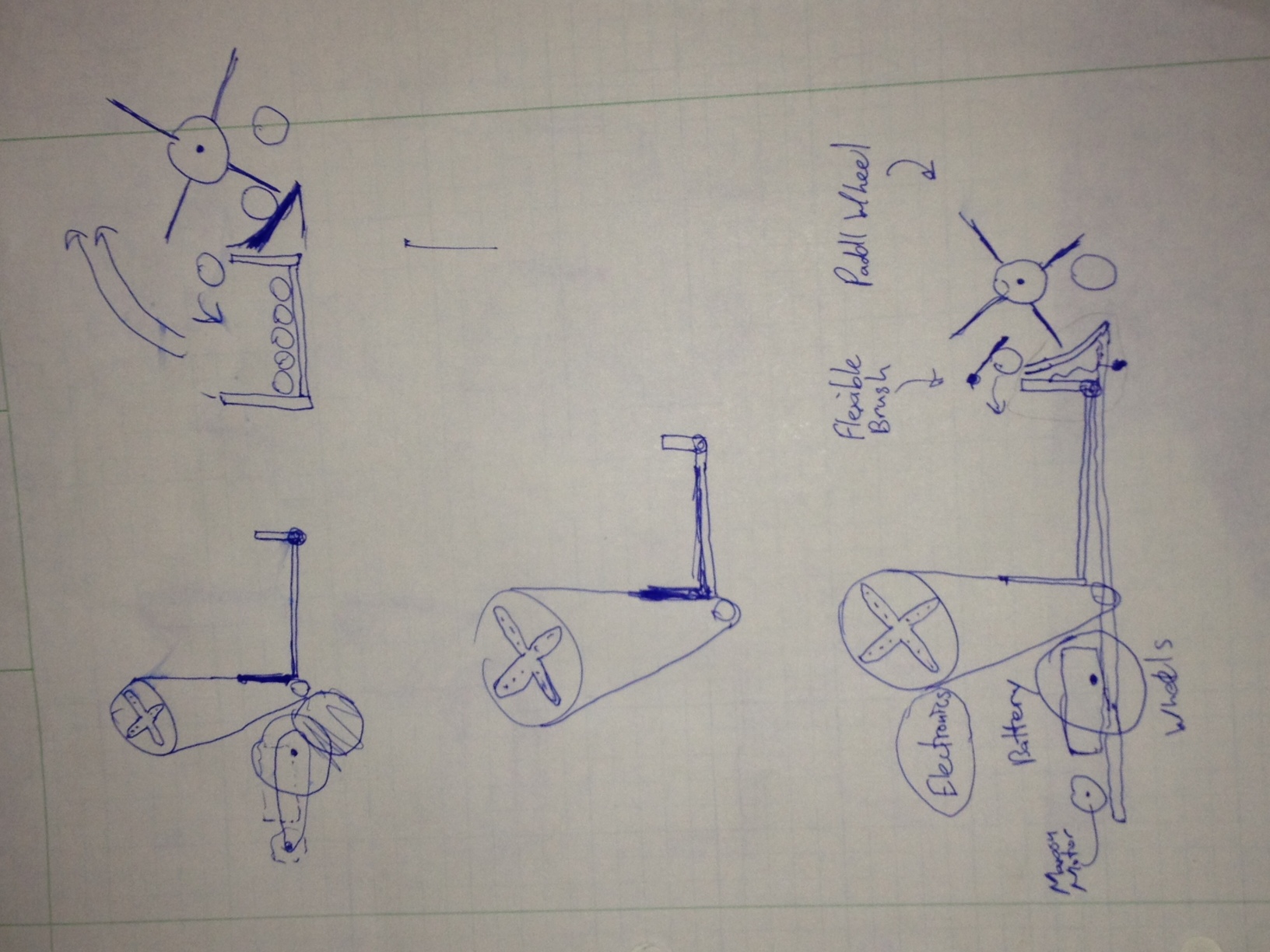
Ball Collector

The ball collector consists of a roller, a comb-like structure and an elastic string mesh. The roller has four flaps spaced out at 90 degrees apart to push the balls inwards. To guide the balls upward, a curved wall is installed behind the roller.
When in contact with the comb-like structure at the top of the roller, the balls get pushed through the elastic string mesh. The mesh then guides the ball down to the collector box.
When in contact with the comb-like structure at the top of the roller, the balls get pushed through the elastic string mesh. The mesh then guides the ball down to the collector box.
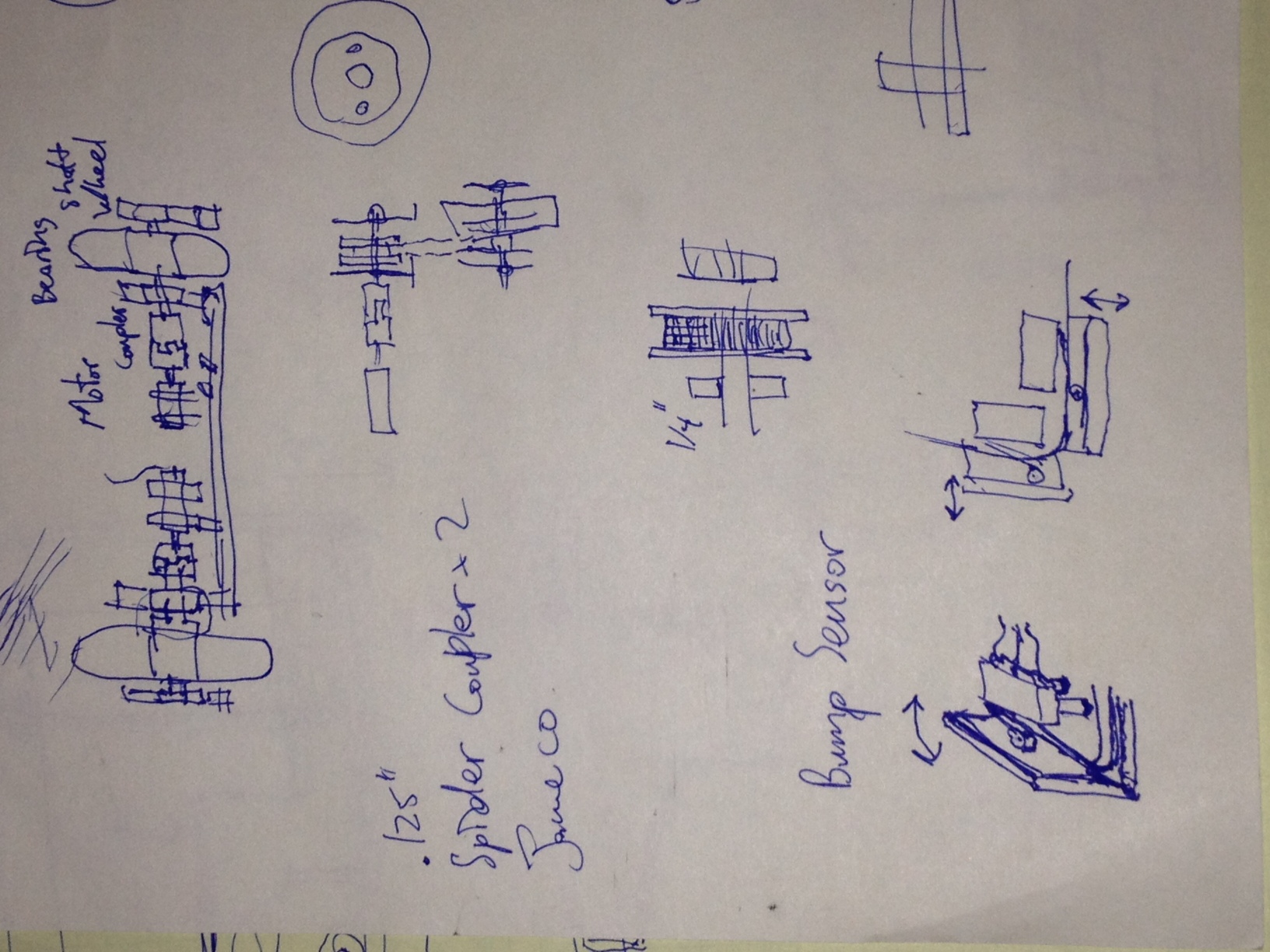
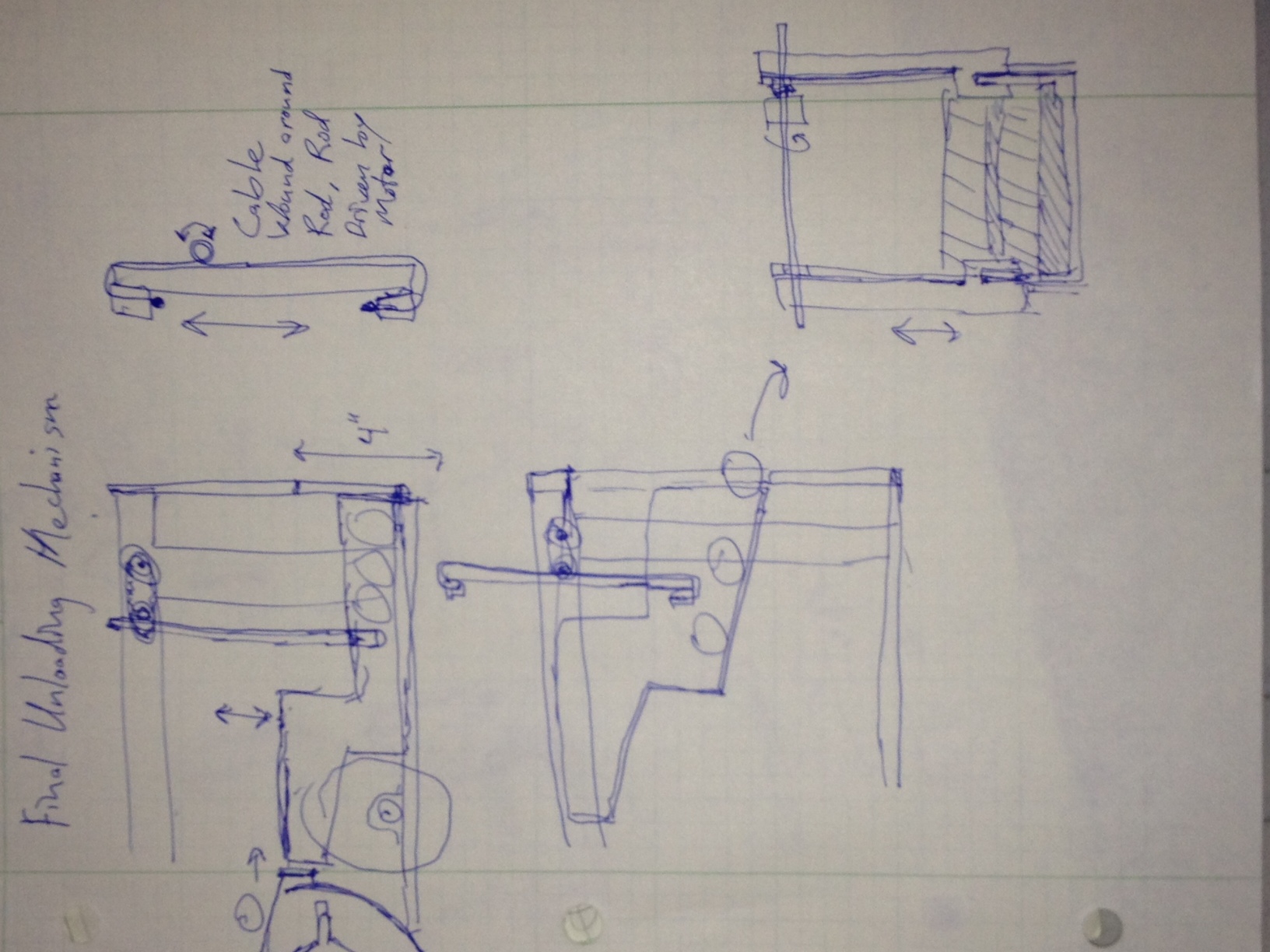
Capstan Transmission
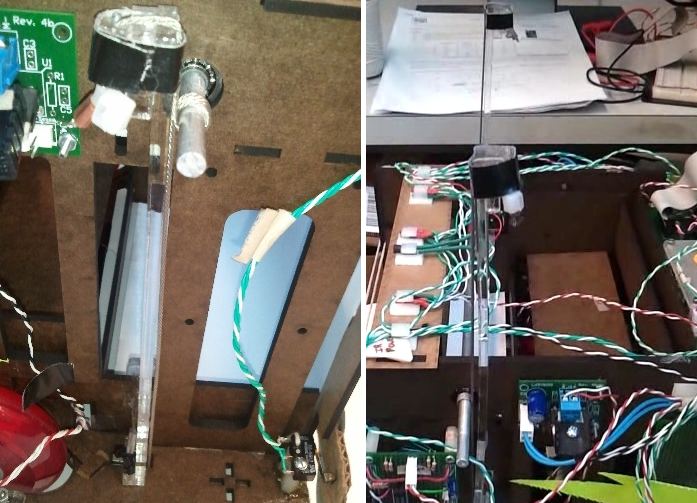
To convert rotary motion from the motor to linear motion, we installed capstan transmission at both sides of the collector box. When the motor spins, cable coils around the drive shaft to pull the acrylic guides upwards. To ensure that the cables wrap without slipping, the cable is wrapped multiple times around the shaft. We also attach limit switches to stop the box at the desired positions.
Compared to other rotary to linear transmissions like ball screw, lead screw and rack-and-pinion, capstan drives are light weight and are simple in design. Moreover, since the cables are flexible, capstan transmission is robust to alignment and construction errors that result from the limited accuracy of laserCAMMs.
Compared to other rotary to linear transmissions like ball screw, lead screw and rack-and-pinion, capstan drives are light weight and are simple in design. Moreover, since the cables are flexible, capstan transmission is robust to alignment and construction errors that result from the limited accuracy of laserCAMMs.
