Game Description
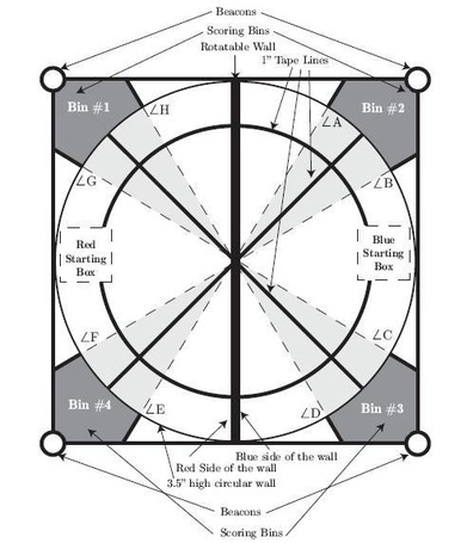
The objective of the game is to gather up ping-pong balls off the floor of the field and deposit them into bins at the corners of the field. The bins are distinguished by different frequencies Infra-Red emitters situated at each of the 4 bins. There is a rotatable wall that distinguish the bins between the red team and the blue team. To increase the complexity of the game, robots from both sides can claim balls at each of the bins by shifting the rotatable wall.
Robot Functions and Strategy
For the game play strategy, we wanted a simple strategy both for robustness and for ease of debugging. To avoid the possibility of having our bin taken over, we decided to deposit only once at the end of the game. To make this possible, we made our ball storage area as large as possible.
In our strategy, the robot will be collecting balls during the first 90 seconds of the game and depositing ping pong balls after that. The collection strategy is to perform a random walk around the playing field. Limit switches were installed at front, sides and back of the robot. The robot reverses and changes direction when any of the switches activate.
Ball deposit is performed by aligning the back of the vehicle towards a particular beacon using the IR beacon sensor. The vehicle will then drive backward towards the beacon until either the left or right limit switch on the back of the vehicle is activated. The vehicle will then align itself with the wall by rotating until both of the limit switches on the back of the vehicle is activated. After aligning itself with the wall, the vehicle will then unload the collected balls into the bins.
In our strategy, the robot will be collecting balls during the first 90 seconds of the game and depositing ping pong balls after that. The collection strategy is to perform a random walk around the playing field. Limit switches were installed at front, sides and back of the robot. The robot reverses and changes direction when any of the switches activate.
Ball deposit is performed by aligning the back of the vehicle towards a particular beacon using the IR beacon sensor. The vehicle will then drive backward towards the beacon until either the left or right limit switch on the back of the vehicle is activated. The vehicle will then align itself with the wall by rotating until both of the limit switches on the back of the vehicle is activated. After aligning itself with the wall, the vehicle will then unload the collected balls into the bins.
